Ielu noziedzība mūsdienu gadsimtā ir ļoti izplatīta. Ikvienam ir jāsajūt drošība, atrodoties mājās vai nu naktī guļot, vai dienas laikā. Tātad tirgū ir pieejamas daudzas apsardzes signalizācijas sistēmas. Šīs sistēmas ir ļoti efektīvas, bet dārgas. A ielaušanās trauksme vai iebrucēja trauksme būtībā ir elektroniska ierīce, kas skaņas signālu atklāj iebrucēju mājās. Mēs varam mājās izveidot iebrucēja trauksmes shēmu, kas būs gandrīz vienlīdz efektīva noteiktā attāluma diapazonā un kurai būs ļoti zemas izmaksas.

Drošības trauksme
Šis raksts ir par iebrucēja trauksmes izdarīšanu, izmantojot Arduino un PIR sensoru. Kad PIR sensors konstatēs iebrucēju, tas nosūtīs signālu Arduino un Arduino atskanēs trauksmes signāls. Šī shēma ir ļoti vienkārša, un tā tiks veidota uz Veroboard. Šis Veroboard tiks uzstādīti tajā mājas vietā, kur pastāv lielākas iebrucēja briesmas nokļūt mājas iekšienē.
Kā izveidot uz PIR sensora balstītu iebrucēju trauksmi?
Vislabākā pieeja jebkura projekta uzsākšanai ir sastādīt sastāvdaļu sarakstu un veikt īsu šo komponentu izpēti, jo neviens nevēlas palikt projekta vidū tikai trūkstoša komponenta dēļ. Izveidosim sastāvdaļu sarakstu, iegādājieties tos un sāksim darbu ar projektu. Vero Board ir priekšroka ķēdes montāžai aparatūrā, jo, ja mēs saliekam komponentus uz maizes dēļa, tie var atdalīties no tā un ķēde kļūs īsa, tāpēc priekšroka dodama Veroboard.
1. darbība: komponentu (aparatūras) savākšana
- 10k omu rezistors
- LED
- Buzzer
- 9V akumulators
- 9V akumulatora skava
- Veroboard
- Savienojošie vadi
- Digitālais daudzmetrs
2. darbība: nepieciešamie komponenti (programmatūra)
- Proteus 8 Professional (var lejupielādēt no Šeit )
Pēc Proteus 8 Professional lejupielādes izveidojiet tajā shēmu. Es šeit esmu iekļāvis programmatūras simulācijas, lai iesācējiem varētu būt ērti izstrādāt shēmu un izveidot atbilstošus savienojumus aparatūrā.
3. solis: ķēdes darbība
Šīs ķēdes darbība ir ļoti vienkārša. Sākumā PIR sensora stāvoklis tiek iestatīts uz LOW. tas nozīmē, ka kustība netiek atklāta. Kad PIR sensors noteiks kustību, tas nosūtīs signālu mikrokontrollerim. Pēc tam mikrokontrolleris ieslēgs skaņas signālu un LED. Ja kustība netiek konstatēta, gaismas diode un skaņas signāls paliek izslēgtā stāvoklī.
4. solis: komponentu montāža
Tagad, kad mēs zinām galvenos savienojumus un arī visu mūsu projekta ķēdi, virzīsimies uz priekšu un sāksim veidot mūsu projekta aparatūru. Jāņem vērā viena lieta, ka ķēdei jābūt kompaktai un komponentiem jābūt novietotiem tik tuvu.
- Paņemiet Veroboard un noberzējiet tā sānu ar vara pārklājumu ar skrāpi.
- Tagad uzmanīgi un pietiekami cieši novietojiet komponentus, lai ķēdes izmērs nekļūtu ļoti liels
- Paņemiet divus sieviešu galvenes gabalus un novietojiet to uz Veroboard tā, lai attālumam starp tiem būtu vienāds ar Arduino nano dēļa platumu. Vēlāk mēs šajās sieviešu galvenēs uzstādīsim Arduino nano dēli.
- Uzmanīgi izveidojiet savienojumus, izmantojot lodāmuru. Ja, veicot savienojumus, tiek pieļauta kāda kļūda, mēģiniet atvienot savienojumu un atkal pareizi pielodēt savienojumu, taču galu galā savienojumam jābūt stingram.
- Kad visi savienojumi ir izveidoti, veiciet nepārtrauktības pārbaudi. Elektronikā nepārtrauktības pārbaude ir elektriskās ķēdes pārbaude, lai pārbaudītu, vai strāva plūst vēlamajā ceļā (ka tā noteikti ir kopējā ķēde). Nepārtrauktības pārbaude tiek veikta, iestatot nelielu spriegumu (vadu savienots ar LED vai satraukumu, radot daļu, piemēram, pjezoelektrisko skaļruni) pa izvēlēto ceļu.
- Ja nepārtrauktības tests iztur, tas nozīmē, ka ķēde ir atbilstoši izveidota pēc vēlēšanās. Tagad tas ir gatavs pārbaudei.
- Pievienojiet akumulatoru ķēdei.
Tagad pārbaudiet visus savienojumus, aplūkojot zemāk esošo shēmu:

Ķēdes shēma
5. solis: darba sākšana ar Arduino
Ja vēl neesat pazīstams ar Arduino IDE, neuztraucieties, jo tālāk ir paskaidrota pakāpeniska procedūra, kā iestatīt un izmantot Arduino IDE ar mikrokontrolleru paneli.
- Lejupielādējiet jaunāko Arduino IDE versiju no Arduino.
- Pievienojiet savu Arduino Nano dēli klēpjdatoram un atveriet vadības paneli. vadības panelī noklikšķiniet uz Aparatūra un skaņa . Tagad noklikšķiniet uz Ierīces un printeri. Šeit atrodiet portu, kuram ir pievienota jūsu mikrokontrolleru plate. Manā gadījumā tā ir COM14 bet dažādos datoros tas ir atšķirīgs.
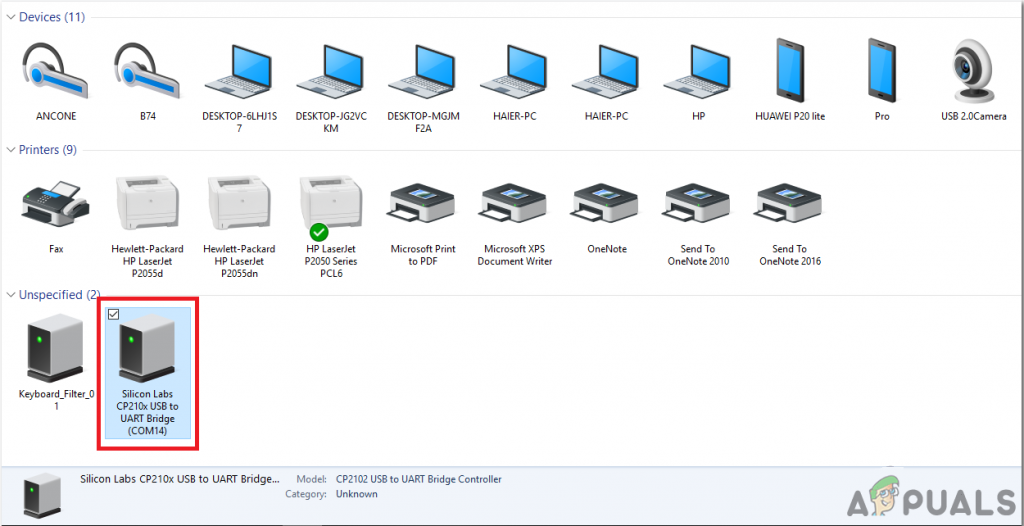
Ostas atrašana
- Noklikšķiniet uz izvēlnes Rīks. un iestatiet dēli uz Arduino Nano no nolaižamās izvēlnes.
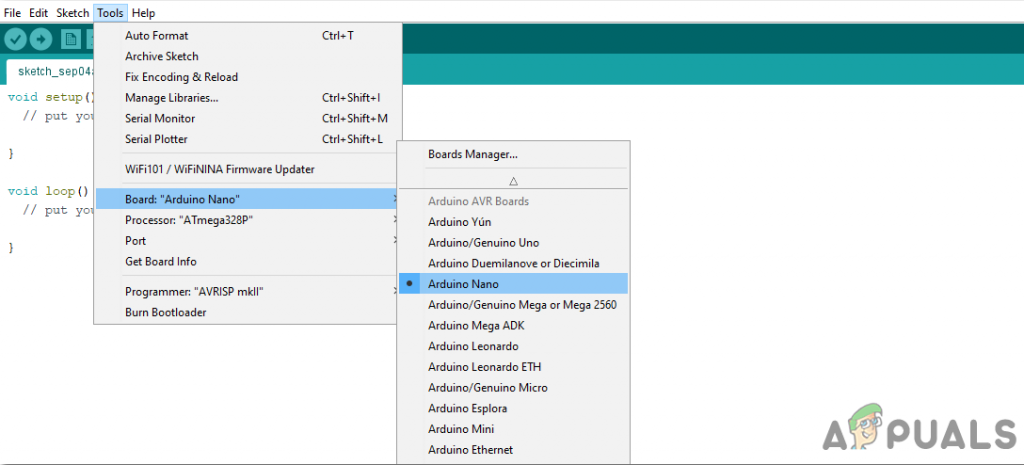
Dēļu iestatīšana
- Tajā pašā izvēlnē Rīks iestatiet portu uz porta numuru, kuru iepriekš novērojāt Ierīces un printeri .
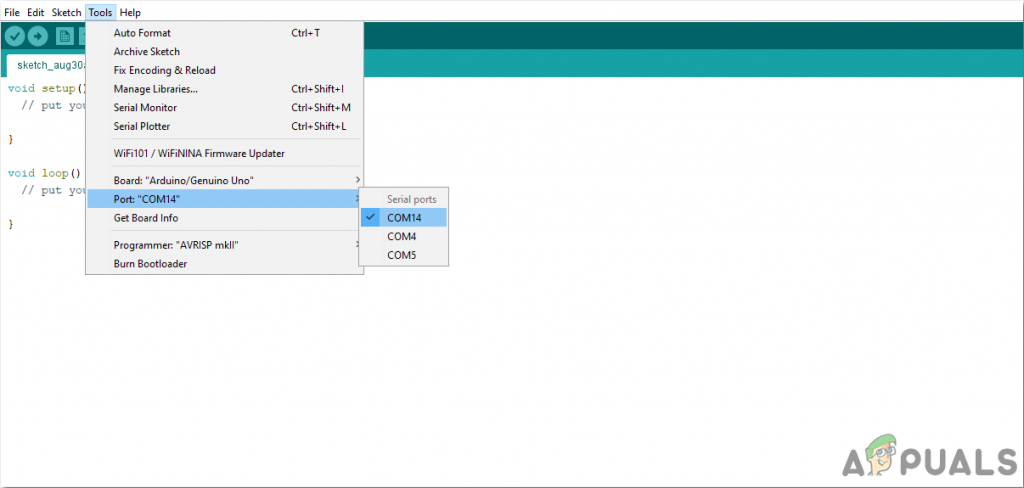
Portas iestatīšana
- Tajā pašā izvēlnē Rīks iestatiet Procesors uz ATmega328P (Old Bootloader).
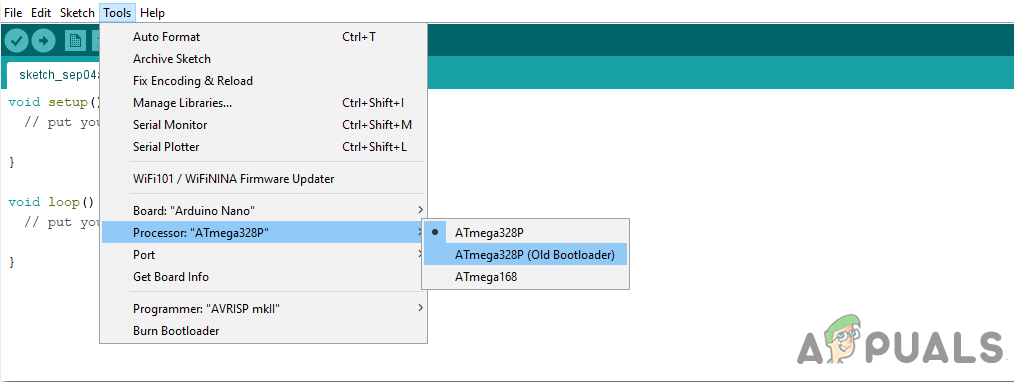
Procesors
- Lejupielādējiet zemāk pievienoto kodu un ielīmējiet to savā Arduino IDE. Noklikšķiniet uz augšupielādēt pogu, lai ierakstītu kodu mikrokontrolleru dēlī.
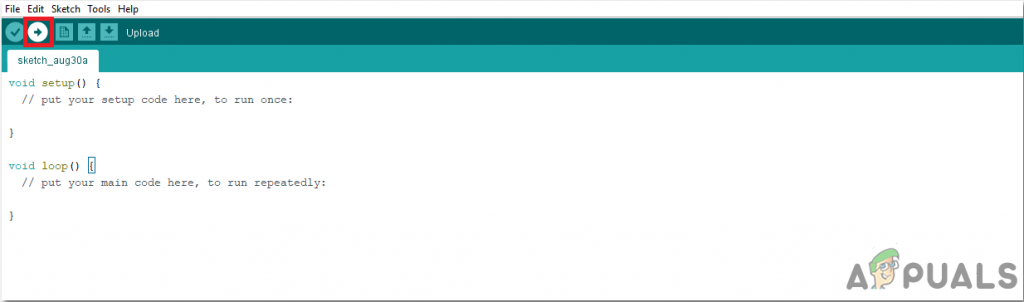
Augšupielādēt





Lai lejupielādētu kodu, noklikšķiniet šeit.
6. solis: izpratne par kodeksu
Šī projekta kods ir diezgan labi komentēts un ļoti viegli saprotams. Bet tomēr tas ir īsumā paskaidrots zemāk.
1. Sākumā tiek inicializēti Arduino tapas, kuras vēlāk tiks savienotas ar LED un skaņas signālu. Tiek deklarēts arī mainīgais, kas darbības laikā saglabās dažas vērtības. Tad PIR sākotnējais stāvoklis tiek iestatīts uz LOW, kas nozīmē, ka tiek teikts, ka sākotnēji kustība netiek atklāta.
int ledPin = 5; // izvēlieties tapu LED int Buzzer = 6; // izvēlieties tapu Buzzer int inputPin = 2; // izvēlieties ievades tapu (PIR sensoram) int pirState = LOW; // mēs sākam, pieņemot, ka kustība nav atklāta int val = 0; // mainīgais piespraudes statusa nolasīšanai un glabāšanai turpmākai izmantošanai
2. anulēt iestatīšanu () ir funkcija, kurā mēs inicializējam Arduino dēļa tapas, lai tās izmantotu kā INPUT vai OUTPUT. Šajā funkcijā ir iestatīts arī pārraides ātrums. Buda ātrums ir biti sekundē ātrums, ar kuru mikrokontrolleris sazinās ar ārējām ierīcēm.
void setup () {pinMode (ledPin, OUTPUT); // deklarēt LED kā izejas pinMode (Buzzer, OUTPUT); // pasludināt skaņas signālu par izejas pinMode (inputPin, INPUT); // deklarēt sensoru kā ievadi Serial.begin (9600); // iestatiet pārraides ātrumu, kas vienāds ar 9600}3. void loop () ir funkcija, kas darbojas atkal un atkal ciklā. Šajā funkcijā mikrokontrolleris ir ieprogrammēts, tāpēc, ja tas atklāj kustību, tas nosūtīs signālu skaņas signālam un LED un ieslēgs tos. Ja kustība netiek atklāta, tā neko nedarīs.
void loop () {val = digitalRead (inputPin); // nolasīt ievades vērtību no PIR sensora, ja (val == HIGH) // Ja kustība tiek atklāta pirms {digitalWrite (ledPin, HIGH); // ieslēdziet LED digitalWrite (Buzzer, 1); // ieslēdziet Buzzer ON aizturi (5000); // izveidojiet piecu sekunžu kavēšanos, ja (pirState == LOW) {// ja sākotnēji stāvoklis ir zems, nozīmē, ka pirms kustības netika konstatēta // mēs tikko ieslēdzām Serial.println ('Kustība konstatēta!'); // Drukājiet oon sērijveida monitoru, ka tiek konstatēta kustība pirState = HIGH; // pirState ir iestatīts uz HIGH}} else {digitalWrite (ledPin, LOW); // izslēgt LED OFF digitalwrite (Buzzer, 0); // izslēdziet skaņas signālu, ja (pirState == HIGH) {// ja stāvoklis sākotnēji ir AUGSTS, nozīmē, ka kāda kustība tika konstatēta pirms // mēs tikko izslēdzām Serial.println ('Kustība beidzās!'); // Drukājiet uz sērijveida monitora, ka kustībai ir beigas pirState = LOW; // pirState ir iestatīts uz LOW}}}Tātad, šī bija visa procedūra, kā mājās izveidot drošības trauksmes ķēdi, izmantojot PIR sensoru. Tagad jūs varat sākt strādāt un izveidot pats savu zemo cenu un efektīvu drošības trauksmi.